

People News
-

KAIST develops ‘Hoverbike’ to roam the future skie..
< Photo 1. A group photo of the research team > Hoverbike is a kind of next-generation mobility that can complement the existing transportation system and can be used as an air transportation means without traffic congestion through high-weight payloads and long-distance flights. It is expected that domestic researchers will contribute to the development of the domestic PAV* and UAM markets by developing a domestically developed manned/unmanned hybrid aircraft that escapes dependence on foreign technology through the development of a high-performance hoverbike. *PAV: Personal Aerial Vehicle. It is a key element of future urban air mobility (UAM, Urban Air Mobility) and constitutes an important part of the next-generation transportation system. KAIST (President Kwang-Hyung Lee) announced on the 27th of December that the research team of Professor Hyochoong Bang of the Department of Aerospace Engineering successfully developed the core technology of a highly reliable multipurpose vertical takeoff and landing hoverbike that can be operated by both manned and unmanned vehicles. This research was participated by the research teams of Professor Jae-Hung Han, Professor Ji-yun Lee, Professor Jae-myung Ahn, Professor Han-Lim Choi, and Professor Chang-Hun Lee of the Department of Aerospace Engineering at KAIST, Professor Dongjin Lee of the Department of Unmanned Aerial Vehicles at Hanseo University, and Professor Jong-Oh Park of the Department of Electronics Engineering at Dong-A University. The research team secured key technologies related to the optimal design of a multipurpose aircraft, hybrid propulsion system, highly reliable precision navigation and flight control system, autonomous flight, and fault detection for the development of a high-performance hoverbike. < Figure 1. Key features of high-reliability multi-purpose hoverbike > The hoverbike platform introduced a gasoline engine-based hybrid system to overcome the shortcomings of battery-based drones, achieving approximately 60% better performance and maximum payload weight compared to overseas technology levels. Through this, it is expected to be utilized in various fields such as emergency supply delivery, logistics, and rescue activities for civilian use, and military transport and mission support for military use. The navigation system was applied by implementing multi-sensor fusion technology based on DGPS/INS* to enable stable flight even in environments without GPS or with weak signals using high-reliability precision navigation technology. *DGPS/INS: Navigation solution combining high accuracy of Differential GPS (DGPS) and Inertial Navigation System (INS) In addition, high-reliability flight control technology was developed to enable reliable maneuvering even under external factors such as payload and wind, and model uncertainty, and fault detection technology was also developed. A guidance technique to automatically land on a helipad after selecting a safe automatic landing area by configuring a high-reliability autonomous flight system was implemented with high accuracy. Stable operation is possible even in complex environments through obstacle avoidance and automatic landing autonomous flight technology. < Figure 2. Hoverbike prototype model > Professor Hyochoong Bang, the research director, emphasized, “We have proven the high practicality of the hoverbike in various environments through high-reliability flight control and precision navigation technology.” He added, “The hoverbike is a promising research result that can not only provide a major path leading to PAVs and future aircraft, but also surpass existing drone technology by several levels. This achievement is even more meaningful because it is the result of five years of effort by eight joint research teams, including the project’s practitioners, PhD students Kwangwoo Jang and Hyungjoo Ahn.” This study aims to secure core technologies for manned/unmanned multipurpose hoverbikes that can be utilized as new concept aircraft in the defense and civilian sectors. It started as the Defense Acquisition Program Administration’s Defense Technology for Future Challenge Research and Development Project in 2019 and was completed in 2024 under the management of the Agency for Defense Development. It is scheduled to be exhibited for the first time at the 2025 Drone Show Korea (DSK2025), which will be held at BEXCO in Busan from February 26 to 28, 2025.
-
KAIST Develops Foundational Technology to Revert C..
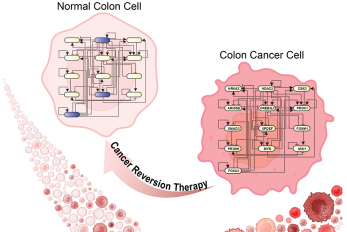
Despite the development of numerous cancer treatment technologies, the common goal of current cancer therapies is to eliminate cancer cells. This approach, however, faces fundamental limitations, including cancer cells developing resistance and returning, as well as severe side effects from the destruction of healthy cells. < (From top left) Bio and Brain Engineering PhD candidates Juhee Kim, Jeong-Ryeol Gong, Chun-Kyung Lee, and Hoon-Min Kim posed for a group photo with Professor Kwang-Hyun Cho > KAIST (represented by President Kwang Hyung Lee) announced on the 20th of December that a research team led by Professor Kwang-Hyun Cho from the Department of Bio and Brain Engineering has developed a groundbreaking technology that can treat colon cancer by converting cancer cells into a state resembling normal colon cells without killing them, thus avoiding side effects. The research team focused on the observation that during the oncogenesis process, normal cells regress along their differentiation trajectory. Building on this insight, they developed a technology to create a digital twin of the gene network associated with the differentiation trajectory of normal cells. < Figure 1. Technology for creating a digital twin of a gene network from single-cell transcriptome data of a normal cell differentiation trajectory. Professor Kwang-Hyun Cho's research team developed a digital twin creation technology that precisely observes the dynamics of gene regulatory relationships during the process of normal cells differentiating along a differentiation trajectory and analyzes the relationships among key genes to build a mathematical model that can be simulated (A-F). In addition, they developed a technology to discover key regulatory factors that control the differentiation trajectory of normal cells by simulating and analyzing this digital twin. > < Figure 2. Digital twin simulation simulating the differentiation trajectory of normal colon cells. The dynamics of single-cell transcriptome data for the differentiation trajectory of normal colon cells were analyzed (A) and a digital twin of the gene network was developed representing the regulatory relationships of key genes in this differentiation trajectory (B). The simulation results of the digital twin confirm that it readily reproduces the dynamics of single-cell transcriptome data (C, D). > Through simulation analysis, the team systematically identified master molecular switches that induce normal cell differentiation. When these switches were applied to colon cancer cells, the cancer cells reverted to a normal-like state, a result confirmed through molecular and cellular experiments as well as animal studies. < Figure 3. Discovery of top-level key control factors that induce differentiation of normal colon cells. By applying control factor discovery technology to the digital twin model, three genes, HDAC2, FOXA2, and MYB, were discovered as key control factors that induce differentiation of normal colon cells (A, B). The results of simulation analysis of the regulatory effects of the discovered control factors through the digital twin confirmed that they could induce complete differentiation of colon cells (C). > < Figure 4. Verification of the effect of the key control factors discovered using colon cancer cells and animal experiments on the reversibility of colon cancer. The key control factors of the normal colon cell differentiation trajectory discovered through digital twin simulation analysis were applied to actual colon cancer cells and colon cancer mouse animal models to experimentally verify the effect of cancer reversibility. The key control factors significantly reduced the proliferation of three colon cancer cell lines (A), and this was confirmed in the same way in animal models (B-D). > This research demonstrates that cancer cell reversion can be systematically achieved by analyzing and utilizing the digital twin of the cancer cell gene network, rather than relying on serendipitous discoveries. The findings hold significant promise for developing reversible cancer therapies that can be applied to various types of cancer. < Figure 5. The change in overall gene expression was confirmed through the regulation of the identified key regulatory factors, which converted the state of colon cancer cells to that of normal colon cells. The transcriptomes of colon cancer tissues and normal colon tissues from more than 400 colon cancer patients were compared with the transcriptomes of colon cancer cell lines and reversible colon cancer cell lines, respectively. The comparison results confirmed that the regulation of the identified key regulatory factors converted all three colon cancer cell lines to a state similar to the transcriptome expression of normal colon tissues. > Professor Kwang-Hyun Cho remarked, "The fact that cancer cells can be converted back to normal cells is an astonishing phenomenon. This study proves that such reversion can be systematically induced." He further emphasized, "This research introduces the novel concept of reversible cancer therapy by reverting cancer cells to normal cells. It also develops foundational technology for identifying targets for cancer reversion through the systematic analysis of normal cell differentiation trajectories." This research included contributions from Jeong-Ryeol Gong, Chun-Kyung Lee, Hoon-Min Kim, Juhee Kim, and Jaeog Jeon, and was published in the online edition of the international journal Advanced Science by Wiley on December 11. (Title: “Control of Cellular Differentiation Trajectories for Cancer Reversion”) DOI: https://doi.org/10.1002/advs.202402132 < Figure 6. Schematic diagram of the research results. Professor Kwang-Hyun Cho's research team developed a source technology to systematically discover key control factors that can induce reversibility of colon cancer cells through a systems biology approach and a digital twin simulation analysis of the differentiation trajectory of normal colon cells, and verified the effects of reversion on actual colon cancer through molecular cell experiments and animal experiments. > The study was supported by the Ministry of Science and ICT and the National Research Foundation of Korea through the Mid-Career Researcher Program and Basic Research Laboratory Program. The research findings have been transferred to BioRevert Inc., where they will be used for the development of practical cancer reversion therapies.
-
KAIST Scientifically Identifies a Method to Preven..
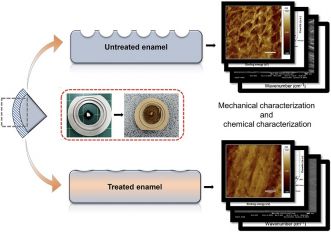
A Korean research team, which had previously visualized and scientifically proven the harmful effects of carbonated drinks like cola on dental health using nanotechnology, has now identified a mechanism for an effective method to prevent tooth damage caused by these beverages. KAIST (represented by President Kwang Hyung Lee) announced on the 5th of December that a team led by Professor Seungbum Hong from the Department of Materials Science and Engineering, in collaboration with Seoul National University's School of Dentistry (Departments of Pediatric Dentistry and Oral Microbiology) and Professor Hye Ryung Byon’s research team from the Department of Chemistry, has revealed through nanotechnology that silver diamine fluoride (SDF)* forms a fluoride-containing protective layer on the tooth surface, effectively inhibiting cola-induced erosion. *SDF (Silver Diamine Fluoride): A dental agent primarily used for the treatment and prevention of tooth decay. SDF strengthens carious lesions, suppresses bacterial growth, and halts the progression of cavities. The team analyzed the surface morphology and mechanical properties of tooth enamel on a nanoscale using atomic force microscopy (AFM). They also examined the chemical properties of the nano-film formed by SDF treatment using X-ray photoelectron spectroscopy (XPS)* and Fourier-transform infrared spectroscopy (FTIR)*. *XPS (X-ray Photoelectron Spectroscopy): A powerful surface analysis technique used to investigate the chemical composition and electronic structure of materials. *FTIR (Fourier-Transform Infrared Spectroscopy): An analytical method that identifies the molecular structure and composition of materials by analyzing how they absorb or transmit infrared light. The findings showed significant differences in surface roughness and elastic modulus between teeth exposed to cola with and without SDF treatment. Teeth treated with SDF exhibited minimal changes in surface roughness due to erosion (from 64 nm to 70 nm) and maintained a high elastic modulus (from 215 GPa to 205 GPa). This was attributed to the formation of a fluoroapatite* layer by SDF, which acted as a protective shield. *Fluoroapatite: A phosphate mineral with the chemical formula Ca₅(PO₄)₃F (calcium fluoro-phosphate). It can occur naturally or be synthesized biologically/artificially and plays a crucial role in strengthening teeth and bones. < Figure 1. Schematic of the workflow. Surface morphology and mechanical properties of untreated and treated silver diamine fluoride (SDF) treated enamel exposed to cola were analyzed over time using atomic force microscopy (AFM). > Professor Young J. Kim from Seoul National University's Department of Pediatric Dentistry noted, "This technology could be applied to prevent dental erosion and strengthen teeth for both children and adults. It is a cost-effective and accessible dental treatment." < Figure 2. Changes in surface roughness and elastic modulus according to time of exposure to cola for SDF untreated and treated teeth. After 1 hour, the surface roughness of the SDF untreated teeth rapidly became rougher from 83 nm to 287 nm and the elastic modulus weakened from 125 GPa to 13 GPa, whereas the surface roughness of the SDF treated teeth changed only slightly from 64 nm to 70 nm and the elastic modulus barely changed from 215 GPa to 205 GPa, maintaining a similar state to the initial state. > Professor Seungbum Hong emphasized, "Dental health significantly impacts quality of life. This research offers an effective non-invasive method to prevent early dental erosion, moving beyond traditional surgical treatments. By simply applying SDF, dental erosion can be prevented and enamel strengthened, potentially reducing pain and costs associated with treatment." This study, led by the first author Aditi Saha, a PhD student in KAIST’s Department of Materials Science and Engineering, was published in the international journal Biomaterials Research on November 7 under the title "Nanoscale Study on Noninvasive Prevention of Dental Erosion of Enamel by Silver Diamine Fluoride". The research was supported by the National Research Foundation of Korea.
-
KAIST Secures Core Technology for Ultra-High-Resol..
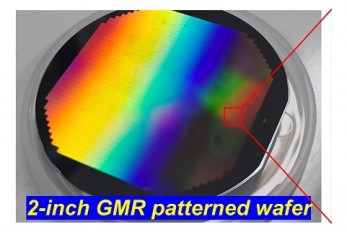
A joint research team from Korea and the United States has developed next-generation, high-resolution image sensor technology with higher power efficiency and a smaller size compared to existing sensors. Notably, they have secured foundational technology for ultra-high-resolution shortwave infrared (SWIR) image sensors, an area currently dominated by Sony, paving the way for future market entry. KAIST (represented by President Kwang Hyung Lee) announced on the 20th of November that a research team led by Professor SangHyeon Kim from the School of Electrical Engineering, in collaboration with Inha University and Yale University in the U.S., has developed an ultra-thin broadband photodiode (PD), marking a significant breakthrough in high-performance image sensor technology. This research drastically improves the trade-off between the absorption layer thickness and quantum efficiency found in conventional photodiode technology. Specifically, it achieved high quantum efficiency of over 70% even in an absorption layer thinner than one micrometer (μm), reducing the thickness of the absorption layer by approximately 70% compared to existing technologies. A thinner absorption layer simplifies pixel processing, allowing for higher resolution and smoother carrier diffusion, which is advantageous for light carrier acquisition while also reducing the cost. However, a fundamental issue with thinner absorption layers is the reduced absorption of long-wavelength light. < Figure 1. Schematic diagram of the InGaAs photodiode image sensor integrated on the Guided-Mode Resonance (GMR) structure proposed in this study (left), a photograph of the fabricated wafer, and a scanning electron microscope (SEM) image of the periodic patterns (right) > The research team introduced a guided-mode resonance (GMR) structure* that enables high-efficiency light absorption across a wide spectral range from 400 nanometers (nm) to 1,700 nanometers (nm). This wavelength range includes not only visible light but also light the SWIR region, making it valuable for various industrial applications. *Guided-Mode Resonance (GMR) Structure: A concept used in electromagnetics, a phenomenon in which a specific (light) wave resonates (forming a strong electric/magnetic field) at a specific wavelength. Since energy is maximized under these conditions, it has been used to increase antenna or radar efficiency. The improved performance in the SWIR region is expected to play a significant role in developing next-generation image sensors with increasingly high resolutions. The GMR structure, in particular, holds potential for further enhancing resolution and other performance metrics through hybrid integration and monolithic 3D integration with complementary metal-oxide-semiconductor (CMOS)-based readout integrated circuits (ROIC). < Figure 2. Benchmark for state-of-the-art InGaAs-based SWIR pixels with simulated EQE lines as a function of TAL variation. Performance is maintained while reducing the absorption layer thickness from 2.1 micrometers or more to 1 micrometer or less while reducing it by 50% to 70% > The research team has significantly enhanced international competitiveness in low-power devices and ultra-high-resolution imaging technology, opening up possibilities for applications in digital cameras, security systems, medical and industrial image sensors, as well as future ultra-high-resolution sensors for autonomous driving, aerospace, and satellite observation. Professor Sang Hyun Kim, the lead researcher, commented, “This research demonstrates that significantly higher performance than existing technologies can be achieved even with ultra-thin absorption layers.” < Figure 3. Top optical microscope image and cross-sectional scanning electron microscope image of the InGaAs photodiode image sensor fabricated on the GMR structure (left). Improved quantum efficiency performance of the ultra-thin image sensor (red) fabricated with the technology proposed in this study (right) > The results of this research were published on 15th of November, in the prestigious international journal Light: Science & Applications (JCR 2.9%, IF=20.6), with Professor Dae-Myung Geum of Inha University (formerly a KAIST postdoctoral researcher) and Dr. Jinha Lim (currently a postdoctoral researcher at Yale University) as co-first authors. (Paper title: “Highly-efficient (>70%) and Wide-spectral (400 nm -1700 nm) sub-micron-thick InGaAs photodiodes for future high-resolution image sensors”) This study was supported by the National Research Foundation of Korea.
-
KAIST Develops a Multifunctional Structural Batter..
Structural batteries are used in industries such as eco-friendly, energy-based automobiles, mobility, and aerospace, and they must simultaneously meet the requirements of high energy density for energy storage and high load-bearing capacity. Conventional structural battery technology has struggled to enhance both functions concurrently. However, KAIST researchers have succeeded in developing foundational technology to address this issue. < Photo 1. (From left) Professor Seong Su Kim, PhD candidates Sangyoon Bae and Su Hyun Lim of the Department of Mechanical Engineering > < Photo 2. (From left) Professor Seong Su Kim and Master's Graduate Mohamad A. Raja of KAIST Department of Mechanical Engineering > KAIST (represented by President Kwang Hyung Lee) announced on the 19th of November that Professor Seong Su Kim's team from the Department of Mechanical Engineering has developed a thin, uniform, high-density, multifunctional structural carbon fiber composite battery* capable of supporting loads, and that is free from fire risks while offering high energy density. *Multifunctional structural batteries: Refers to the ability of each material in the composite to simultaneously serve as a load-bearing structure and an energy storage element. Early structural batteries involved embedding commercial lithium-ion batteries into layered composite materials. These batteries suffered from low integration of their mechanical and electrochemical properties, leading to challenges in material processing, assembly, and design optimization, making commercialization difficult. To overcome these challenges, Professor Kim's team explored the concept of "energy-storing composite materials," focusing on interface and curing properties, which are critical in traditional composite design. This led to the development of high-density multifunctional structural carbon fiber composite batteries that maximize multifunctionality. The team analyzed the curing mechanisms of epoxy resin, known for its strong mechanical properties, combined with ionic liquid and carbonate electrolyte-based solid polymer electrolytes. By controlling temperature and pressure, they were able to optimize the curing process. The newly developed structural battery was manufactured through vacuum compression molding, increasing the volume fraction of carbon fibers—serving as both electrodes and current collectors—by over 160% compared to previous carbon-fiber-based batteries. This greatly increased the contact area between electrodes and electrolytes, resulting in a high-density structural battery with improved electrochemical performance. Furthermore, the team effectively controlled air bubbles within the structural battery during the curing process, simultaneously enhancing the battery's mechanical properties. Professor Seong Su Kim, the lead researcher, explained, “We proposed a framework for designing solid polymer electrolytes, a core material for high-stiffness, ultra-thin structural batteries, from both material and structural perspectives. These material-based structural batteries can serve as internal components in cars, drones, airplanes, and robots, significantly extending their operating time with a single charge. This represents a foundational technology for next-generation multifunctional energy storage applications.” < Figure 2. Supplementary cover of ACS Applied Materials & Interfaces > Mohamad A. Raja, a master’s graduate of KAIST’s Department of Mechanical Engineering, participated as the first author of this research, which was published in the prestigious journal ACS Applied Materials & Interfaces on September 10. The paper was recognized for its excellence and selected as a supplementary cover article. (Paper title: “Thin, Uniform, and Highly Packed Multifunctional Structural Carbon Fiber Composite Battery Lamina Informed by Solid Polymer Electrolyte Cure Kinetics.” https://doi.org/10.1021/acsami.4c08698) This research was supported by the National Research Foundation of Korea’s Mid-Career Researcher Program and the National Semiconductor Research Laboratory Development Program.
-

KAIST’s RAIBO2 becomes the World’s First Robo-dog ..
KAIST's quadrupedal walking robot "RAIBO", which can run seamlessly on sandy beaches, has now evolved into "RAIBO2"and achieved the groundbreaking milestone by becomeing the world's first quadrupedal robot to successfully complete a full-course marathon in an official event. < Photo 1. A group photo of RAIBO2 and the team after completing the full-course marathon > KAIST (President Kwang Hyung Lee) announced on the 17th of November that Professor Je Min Hwangbo's research team of the Department of Mechanical Engineering participated in the 22nd Sangju Dried-Persimmon Marathon and completed the full-course race (42.195 km) with a time of 4 hours 19 minutes and 52 seconds. < Photo 2. RAIBO2 after completing the full-course marathon with its official record presented on the photo wall > The Sangju Dried Persimmon Marathon is known for its challenging course featuring two 50 m elevation climbs, each at the 14 km and 28 km marks, making it defficult for amateur runners. This made it an especially demanding challenge for the walking robot, as unexpected losses in efficiency could occur. < Photo 3. RAIBO2 with the completion medal around its neck > To prepare RAIBO2, Professor Hwangbo's team developed a walking controller using reinforcement learning algorithms within their proprietary simulation environment "RaiSim". This simulator allowed the team to simlate diverse terrains such as slopes, stairs, and icy roads to ensure stable walking performance. In particular, RAIBO2's high torque transparency joint mechanism enable the robot to efficiently harvest energy on the downhill slopes to regain some of the energy used in climbing up steep hill. In addition, the stability of the robot was greatly improved through the collaboration with RAION ROBOTICS Inc., a company founded by the researchers from Professor Hwangbo’s lab. < Figure 1. Conceptual diagram of power flow employed by the quadrupedal robot > < Figure 2. The process of leg posture change of RAIBO2 walking at the most efficient walking speed of 3 m/s. By reducing the ground contact speed of the feet, the collision energy loss was reduced, and by minimizing the slipperiness of the foot upon contact, the body's kinetic energy was maintained towards the direction of the movement. > Due to the nature of walking, pedal robots must employ highly complex systems that can withstand periodic vibrations from the frequent impacts that occur upon contact with the ground surface. Immediately after development, high efficiency was already recorded in short-distance experiments in the laboratory at the beginning of the year, but the manufacturing technology of RAION ROBOTICS significantly bolstered RAIBO's performance in running safely for a prolonged time of more than 4 hours among random pack of people in an actual marathon. Compared to previous studies on improving walking efficiency, where external parts or software could not be changed and only limited improvements were made in some areas, Professor Hwangbo’s research team cited the fact that they were able to comprehensively solve problems by developing all steps and parts in-house, including mechanism design, electrical design, software, and artificial intelligence, as a key factor in improving efficiency. Following the development of RAIBO1, the research team developed RAIBO2 and optimized all aspects of the robot. In particular, the team integrated the motor driver circuitry directly into the robot to minimize actuator losses and increase the control bandwidth, greatly improving walking efficiency and stability. < Photo 4. RAIBO2 running the full-course marathon along human participants > Choongin Lee, a Ph.D. Student that co-first author of the studies on RAIBO, said, “Through the marathon project, we demonstrated that RAIBO2 has the walking performance to stably execute services such as delivery and patrol in urban environments with many people and random objects,” and “In follow-up research, we will add autonomous navigation functions to RAIBO and strive to achieve the world’s best walking performance in mountainous and disaster environments.” < Photo 5. RAIBO2 and co-first authors of the related research at the Ph.D. program of the Department of Mechanical Engineering at KAIST. (From left) Choongin Lee, Donghoon Youm, and Jeongsoo Park > This research was conducted with the support of Samsung Electronics Future Technology Promotion Center and RAION ROBOTICS Inc.
-

KAIST’s Beach-Roaming Quadrupedal Robot “RAIBO” to..
“RAIBO”, KAIST’s four-legged robot featuring remarkable agility even on challenging terrains like sandy beaches, is now set to be the first in the world to complete a full marathon. < Photo 1. A group photo of the research team of Professor Je Min Hwangbo (second from the right in the front row) of the Department of Mechanical Engineering who participated in the marathon event at 2024 Geumsan Insam Festival last September > On the 17th of November, KAIST (represented by President Kwang Hyung Lee) announced that Professor Je Min Hwangbo’s team from the Department of Mechanical Engineering has developed an upgraded version, “RAIBO2,” which will take on the full 42.195-kilometer course at the "Sangju Dried-Persimmon Marathon". This is over double the previous maximum distance achieved by quadruped robots, which was limited to around 20 kilometers. The KAIST team has successfully developed a robot that can walk continuously for 43 kilometers on a single charge, completing the course in 4 hours and 40 minutes by following a GPS-guided path on the university’s main athletic field. Through this marathon, the team aims to demonstrate RAIBO2’s walking performance in an actual urban environment. Previously, most measurements of walking robots’ travel distances were confined to controlled laboratory conditions or theoretical data. This marathon challenge is thus significant in that the robot will run alongside the general public in a real urban setting, marking the first attempt to validate the practical potential of four-legged robots in real environments. Quadruped robots have shown advantages in challenging terrains, such as ice, sand, and mountainous areas, where they can walk stably. However, limited travel distance and running time have long been obstacles to wider applications. < Figure 1. Conceptual diagram of power flow employed by the quadruped robot > Professor Hwangbo’s team designed every component of the robot, from its actuators to its mechanical structure, to overcome these limitations. Notably, they implemented an efficient walking control system based on reinforcement learning using their proprietary dynamic simulator “RaiSim”. The team also collected and analyzed walking data from outdoor environments, creating a model to address walking losses. This model was then used to iteratively improve walking efficiency over one full year. < Figure 2. The leg posture change process of RAIBO2 walking at the most efficient walking speed of 3 m/s. By reducing the ground contact speed of the feet, the collision energy loss was reduced, and by minimizing the slipperiness of the foot upon contact, the body's kinetic energy was maintained towards the direction of the movement. > This is the team’s second attempt. Their first was during the marathon event at “Geumsan Insam Festival” in September when the robot’s battery ran out at the 37-kilometer mark, falling short of completion. The battery drained 10 kilometers earlier than expected due to frequent speed changes as the robot adjusted to the pacing of other runners on the course. Following the initial attempt, the team focused on technical improvements for a successful finish. They enhanced control efficiency by implementing joint stiffness control directly onto the motor actuator and increased battery capacity by 33% by refining the internal structure. These improvements enabled the robot to cover a maximum distance of 67 kilometers on straight paths. < Figure 3. Data from completing 43 km on a single charge at the main sports field on campus. Left) GPS data of the driving course used during autonomous running. Middle) Covered distance by the hour. Right) Energy consumption by module > Choongin Lee, a Ph.D. student of RAI Lab who is one of the co-first author of this study, explained, “Our comprehensive analysis of walking losses in terms of mechanics, electrical systems, and walking methods was crucial to improving walking efficiency. This research marks an important milestone in extending the operating range of quadruped robots to urban environments.” < Photo 2. A Photo from Practice Run> This research was supported by the Samsung Electronics Future Technology Development Center and RAION ROBOTICS Co., Ltd. < Photo 3. A Photo from Practice Run >
-

KAIST Researchers Suggest an Extraordinary Alterna..
< (From left) Dr. Cindy Pricilia, Ph.D. Candidate Cheon Woo Moon, Distinguished Professor Sang Yup Lee > Currently, the world is suffering from environmental problems caused by plastic waste. The KAIST research team has succeeded in producing a microbial-based plastic that is biodegradable and can replace existing PET bottles, making it a hot topic. Our university announced on the 7th of November that the research team of Distinguished Professor Sang Yup Lee of the Department of Chemical and Biomolecular Engineering has succeeded in developing a microbial strain that efficiently produces pseudoaromatic polyester monomer to replace polyethylene terephthalate (PET) using systems metabolic engineering. Pseudoaromatic dicarboxylic acids have better physical properties and higher biodegradability than aromatic polyester (PET) when synthesized as polymers, and are attracting attention as an eco-friendly monomer* that can be synthesized into polymers. The production of pseudoaromatic dicarboxylic acids through chemical methods has the problems of low yield and selectivity, complex reaction conditions, and the generation of hazardous waste. *Monomer: A material for making polymers, which is used to synthesize polymers by polymerizing monomers together < Figure. Overview of pseudoaromatic dicarboxylic acid production using metabolically engineered C. glutamicum. > To solve this problem, Professor Sang Yup Lee's research team used metabolic engineering to develop a microbial strain that efficiently produces five types of pseudoaromatic dicarboxylic acids, including 2-pyrone-4,6-dicarboxylic acid and four types of pyridine dicarboxylic acids (2,3-, 2,4-, 2,5-, 2,6-pyridine dicarboxylic acids), in Corynebacterium, a bacterium mainly used for amino acid production. The research team used metabolic engineering techniques to build a platform microbial strain that enhances the metabolic flow of protocatechuic acid, which is used as a precursor for several pseudoaromatic dicarboxylic acids, and prevents the loss of precursors. Based on this, the genetic manipulation target was discovered through transcriptome analysis, producing 76.17 g/L of 2-pyrone-4,6-dicarboxylic acid, and by newly discovering and constructing three types of pyridine dicarboxylic acid production metabolic pathways, successfully producing 2.79 g/L of 2,3-pyridine dicarboxylic acid, 0.49 g/L of 2,4-pyridine dicarboxylic acid, and 1.42 g/L of 2,5-pyridine dicarboxylic acid. In addition, the research team confirmed the production of 15.01 g/L through the construction and reinforcement of the 2,6-pyridine dicarboxylic acid biosynthesis pathway, successfully producing a total of five similar aromatic dicarboxylic acids with high efficiency. In conclusion, the team succeeded in producing 2,4-, 2,5-, and 2,6-pyridine dicarboxylic acids at the world's highest concentration. In particular, 2,4-, 2,5-pyridine dicarboxylic acid achieved production on the scale of g/L, which was previously produced in extremely small amounts (mg/L). Based on this study, it is expected that it will be applied to various polyester production industrial processes, and it is also expected that it will be actively utilized in research on the production of similar aromatic polyesters. Professor Sang Yup Lee, the corresponding author, said, “The significance lies in the fact that we have developed an eco-friendly technology that efficiently produces similar aromatic polyester monomers based on microorganisms,” and “This study will help the microorganism-based bio-monomer industry replace the petrochemical-based chemical industry in the future.” The results of this study were published in the international academic journal, the Proceedings of the National Academy of Sciences of United States of America (PNAS) on October 30th. ※ Paper title: Metabolic engineering of Corynebacterium glutamicum for the production of pyrone and pyridine dicarboxylic acids ※ Author information: Jae Sung Cho (co-first author), Zi Wei Luo (co-first author), Cheon Woo Moon (co-first author), Cindy Prabowo (co-author), Sang Yup Lee (corresponding author) - a total of 5 people This study was conducted with the support of the Development of Next-generation Biorefinery Platform Technologies for Leading Bio-based Chemicals Industry Project and the Development of Platform Technologies of Microbial Cell Factories for the Next-generation Biorefineries Project (Project leader: Professor Sang Yup Lee) from the National Research Foundation supported by the Ministry of Science and Technology and ICT of Korea.
-
KAIST Researchers Introduce New and Improved, Next..
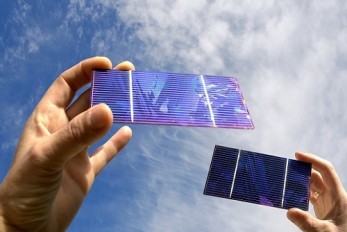
- KAIST-Yonsei university researchers developed innovative dipole technology to maximize near-infrared photon harvesting efficiency - Overcoming the shortcoming of existing perovskite solar cells that cannot utilize approximately 52% of total solar energy - Development of next-generation solar cell technology with high efficiency and high stability that can absorb near-infrared light beyond the existing visible light range with a perovskite-dipole-organic semiconductor hybrid structure < Photo. (From left) Professor Jung-Yong Lee, Ph.D. candidate Min-Ho Lee, and Master’s candidate Min Seok Kim of the School of Electrical Engineering > Existing perovskite solar cells, which have the problem of not being able to utilize approximately 52% of total solar energy, have been developed by a Korean research team as an innovative technology that maximizes near-infrared light capture performance while greatly improving power conversion efficiency. This greatly increases the possibility of commercializing next-generation solar cells and is expected to contribute to important technological advancements in the global solar cell market. The research team of Professor Jung-Yong Lee of the School of Electrical Engineering at KAIST (President Kwang-Hyung Lee) and Professor Woojae Kim of the Department of Chemistry at Yonsei University announced on October 31st that they have developed a high-efficiency and high-stability organic-inorganic hybrid solar cell production technology that maximizes near-infrared light capture beyond the existing visible light range. The research team suggested and advanced a hybrid next-generation device structure with organic photo-semiconductors that complements perovskite materials limited to visible light absorption and expands the absorption range to near-infrared. In addition, they revealed the electronic structure problem that mainly occurs in the structure and announced a high-performance solar cell device that dramatically solved this problem by introducing a dipole layer*. *Dipole layer: A thin material layer that controls the energy level within the device to facilitate charge transport and forms an interface potential difference to improve device performance. Existing lead-based perovskite solar cells have a problem in that their absorption spectrum is limited to the visible light region with a wavelength of 850 nanometers (nm) or less, which prevents them from utilizing approximately 52% of the total solar energy. To solve this problem, the research team designed a hybrid device that combined an organic bulk heterojunction (BHJ) with perovskite and implemented a solar cell that can absorb up to the near-infrared region. In particular, by introducing a sub-nanometer dipole interface layer, they succeeded in alleviating the energy barrier between the perovskite and the organic bulk heterojunction (BHJ), suppressing charge accumulation, maximizing the contribution to the near-infrared, and improving the current density (JSC) to 4.9 mA/cm². The key achievement of this study is that the power conversion efficiency (PCE) of the hybrid device has been significantly increased from 20.4% to 24.0%. In particular, this study achieved a high internal quantum efficiency (IQE) compared to previous studies, reaching 78% in the near-infrared region. < Figure. The illustration of the mechanism of improving the electronic structure and charge transfer capability through Perovskite/organic hybrid device structure and dipole interfacial layers (DILs). The proposed dipole interfacial layer forms a strong interfacial dipole, effectively reducing the energy barrier between the perovskite and organic bulk heterojunction (BHJ), and suppressing hole accumulation. This technology improves near-infrared photon harvesting and charge transfer, and as a result, the power conversion efficiency of the solar cell increases to 24.0%. In addition, it achieves excellent stability by maintaining performance for 1,200 hours even in an extremely humid environment. > In addition, this device showed high stability, showing excellent results of maintaining more than 80% of the initial efficiency in the maximum output tracking for more than 800 hours even under extreme humidity conditions. Professor Jung-Yong Lee said, “Through this study, we have effectively solved the charge accumulation and energy band mismatch problems faced by existing perovskite/organic hybrid solar cells, and we will be able to significantly improve the power conversion efficiency while maximizing the near-infrared light capture performance, which will be a new breakthrough that can solve the mechanical-chemical stability problems of existing perovskites and overcome the optical limitations.” This study, in which KAIST School of Electrical Engineering Ph.D. candidate Min-Ho Lee and Master's candidate Min Seok Kim participated as co-first authors, was published in the September 30th online edition of the international academic journal Advanced Materials. (Paper title: Suppressing Hole Accumulation Through Sub-Nanometer Dipole Interfaces in Hybrid Perovskite/Organic Solar Cells for Boosting Near-Infrared Photon Harvesting). This study was conducted with the support of the National Research Foundation of Korea.
-

Prof. Jae-Hung Han Honored with 2024 KSNVE Academ..
Prof. Jae-Hung Han received 2024 Academic Achievement Award from the Korean Society for Noise and Vibration Engineering (KSNVE) during its annual fall conference. The award is the most prestigious award that the society can bestow and is to recognize lifetime distinguished achievement in the sound and vibration area. The award ceremony took place on October 24 at the High1 Grand Hotel Convention Tower in Jeongseon, Gangwon Province. This award recognizes Prof. Han’s dedicated research efforts in aeroelastic vibration analysis, satellite micro-vibration isolation, and coupled load analysis for launch vehicles.
-
KAIST Professor Uichin Lee Receives Distinguished ..
< Photo. Professor Uichin Lee (left) receiving the award > KAIST (President Kwang Hyung Lee) announced on the 25th of October that Professor Uichin Lee’s research team from the School of Computing received the Distinguished Paper Award at the International Joint Conference on Pervasive and Ubiquitous Computing and International Symposium on Wearable Computing (Ubicomp / ISWC) hosted by the Association for Computing Machinery (ACM) in Melbourne, Australia on October 8. The ACM Ubiquitous Computing Conference is the most prestigious international conference where leading universities and global companies from around the world present the latest research results on ubiquitous computing and wearable technologies in the field of human-computer interaction (HCI). The conference program is composed of invited papers published in the Proceedings of the ACM (PACM) on Interactive, Mobile, Wearable and Ubiquitous Technologies (IMWUT), which covers the latest research in the field of ubiquitous and wearable computing. The Distinguished Paper Award Selection Committee selected eight papers among 205 papers published in the seven volumes of the ACM Proceedings (PACM IMWUT) that made outstanding and exemplary contributions to the research community. The committee consists of 16 prominent experts who are current and former members of the journal's editorial board which made the selection after a rigorous review of all papers for a period that stretched over a month. < Figure 1. BeActive mobile app to promote physical activity to form active lifestyle habits > The research that won the Distinguished Paper Award was conducted by Dr. Junyoung Park, a graduate of the KAIST Graduate School of Data Science, as the 1st author, and was titled “Understanding Disengagement in Just-in-Time Mobile Health Interventions” Professor Uichin Lee’s research team proposed ‘Just-in-Time (JIT) Mobile Health Interventions’ that actively provide interventions in optimal situations by utilizing data collected from health management apps, based on the premise that these apps are aptly in use to ensure effectiveness. < Figure 2. Overview of traditional user-requested digital behavioral intervention notifications (Pull) and automatic transmission (Push) for Just-in-Time (JIT) mobile health interventions using smartphone sensing technologies > The research team conducted a systematic analysis of the decline in participation in digital behavior change interventions. They developed the BeActive system, an app that promotes physical activities designed to help forming active lifestyle habits, and systematically analyzed the effects of users’ self-control ability and boredom-proneness on compliance with behavioral interventions. The results of an 8-week empirical experiment revealed that even if JIT interventions are provided according to the user’s situation, it is impossible to avoid a decline in participation. However, for users with high self-control and low boredom tendency, the compliance with JIT interventions delivered through the app was significantly higher than that of users in other groups. In particular, users with high boredom proneness easily got tired of the repeated timely interventions, and their compliance with the app decreased more quickly than in other groups. < Figure 3. JIT Mobile Health Intervention: a demonstrative case of the BeActive system > Professor Uichin Lee explained, “The results of the first study on the participation in digital therapeutics and wellness services utilizing JIT mobile health interventions provide a starting point for exploring ways to increase participation,” and “It will be possible to develop user-centered artificial intelligence technology that increases participation by utilizing large-scale language models (LLMs) and complex situational awareness technologies.” < Figure 4. A conceptual illustration of engagement in digital health apps. Engagement in digital health apps consists of (1) engagement in using digital health apps and (2) engagement in behavioral interventions provided by digital health apps, i.e., compliance with behavioral interventions. Adherence to behavioral interventions recommended by digital health apps can help achieve the ultimate health goals. > This study was conducted with the support of the 2021 Biomedical Technology Development Program and the 2022 Basic Research and Development Program of the National Research Foundation of Korea funded by the Ministry of Science and ICT. < Figure 5. A conceptual illustration of participation and disengagement. It is divided into participation by use of service provided by the app and participation (adherence) for behavioral intervention. The distinction of participation can be explained by dividing it into adoption, abandonment, and attrition. > < Figure 6. Trends of changes in frequency of app usage and adherence to behavioral intervention over 8 weeks, ● SC: Self-Control Ability (High-SC: user group with high self-control, Low-SC: user group with low self-control) ● BD: Boredom-Proneness (High-BD: user group with high boredom-proneness, Low-BD: user group with low boredom-proneness) >
-

KAIST Develops Thread-like, Flexible Thermoelectri..
A thermoelectric material that can be used in wearable devices such as smart clothing and maintains stable thermal energy performance even in extreme environments has been developed by a team of Korean researchers. It has dramatically resolved the dilemma of striking the balance between achieving good performance and the mechanical flexibility of thermoelectric materials, which has been a long-standing challenge in the field of thermoelectric materials, and has also proven the possibility of commercialization. KAIST (President Kwang-Hyung Lee) announced on the 21st that a joint research team of Professor Yeon Sik Jung of the Department of Materials Science and Engineering and Professor Inkyu Park of the Department of Mechanical Engineering, in collaboration with the research teams of Professor Min-Wook Oh of Hanbat National University (President Yong Jun Oh) and Dr. Jun-Ho Jeong of the Korea Institute of Machinery and Materials (President Seoghyun Ryu), have successfully developed ‘bismuth telluride (Bi2Te3) thermoelectric fibers,’ an innovative energy harvesting solution for next-generation flexible electronic devices. Thermoelectric materials are materials that generate voltage when there is a temperature difference and convert thermal energy into electrical energy. Currently, about 70% of energy being lost as wasted heat, so due attention is being given to research on these as sustainable energy materials that can recover and harvesting energy from this waste heat. Most of the heat sources around us are curved, such as the human body, vehicle exhaust pipes, and cooling fins. Inorganic thermoelectric materials based on ceramic materials boast high thermoelectric performance, but they are fragile and difficult to produce in curved shapes. On the other hand, flexible thermoelectric materials using existing polymer binders can be applied to surfaces of various shapes, but their performance was limited due to the low electrical conductivity and high thermal resistance of the polymer. Existing flexible thermoelectric materials contain polymer additives, but the inorganic thermoelectric material developed by the research team is not flexible, so they overcame these limitations by twisting nano ribbons instead of additives to produce a thread-shaped thermoelectric material. Inspired by the flexibility of inorganic nano ribbons, the research team used a nanomold-based electron beam deposition technique to continuously deposit nano ribbons and then twisted them into a thread shape to create bismuth telluride (Bi2Te3) inorganic thermoelectric fibers. These inorganic thermoelectric fibers have higher bending strength than existing thermoelectric materials, and showed almost no change in electrical properties even after repeated bending and tensile tests of more than 1,000 times. The thermoelectric device created by the research team generates electricity using temperature differences, and if clothes are made with fiber-type thermoelectric devices, electricity can be generated from body temperature to operate other electronic devices. < Figure 1. Schematic diagram and actual image of the all-inorganic flexible thermoelectric yarn made without polymer additives > In fact, the possibility of commercialization was proven through a demonstration of collecting energy by embedding thermoelectric fibers in life jackets or clothing. In addition, it opened up the possibility of building a high-efficiency energy harvesting system that recycles waste heat by utilizing the temperature difference between the hot fluid inside a pipe and the cold air outside in industrial settings. Professor Yeon Sik Jung said, "The inorganic flexible thermoelectric material developed in this study can be used in wearable devices such as smart clothing, and it can maintain stable performance even in extreme environments, so it has a high possibility of being commercialized through additional research in the future." Professor Inkyu Park also emphasized, "This technology will become the core of next-generation energy harvesting technology, and it is expected to play an important role in various fields from waste heat utilization in industrial sites to personal wearable self-power generation devices." This study, in which Hanhwi Jang, a Ph.D. student at KAIST's Department of Materials Science and Engineering, Professor Junseong Ahn of Korea University, Sejong Campus, and Dr. Yongrok Jeong of Korea Atomic Energy Research Institute contributed equally as joint first authors, was published in the online edition of the international academic journal Advanced Materials on September 17, and was selected as the back-cover paper in recognition of its excellence. (Paper title: Flexible All-Inorganic Thermoelectric Yarns) Meanwhile, this study was conducted through the Mid-career Researcher Support Program and the Future Materials Discovery Program of the National Research Foundation of Korea, and the support from the Global Bio-Integrated Materials Center, the Ministry of Trade, Industry and Energy, and the Korea Institute of Industrial Technology Evaluation and Planning (KEIT) upon the support by the Ministry of Science and ICT.
![]()
291 Daehak-ro, Yuseong-gu, Daejeon, Korea 34141
KAIST College of Engineering
T.+82-42-350-2114
F.+82-42-350-2210 (2220)
ⓒ KAIST College of Engineering. All rights reserved.